制作连续的动作
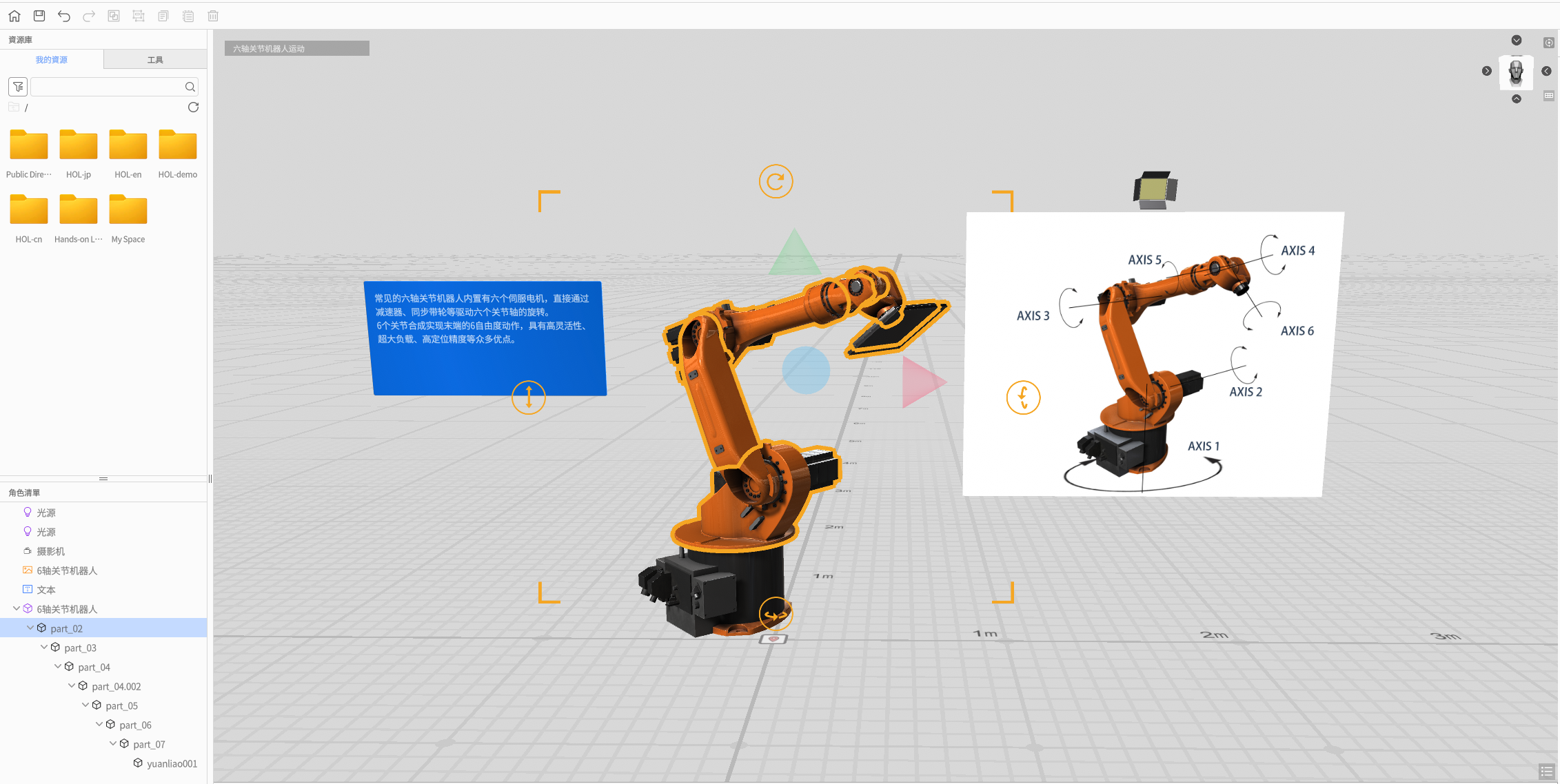
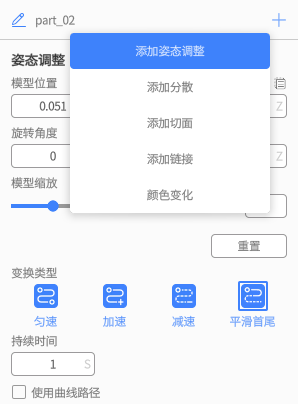
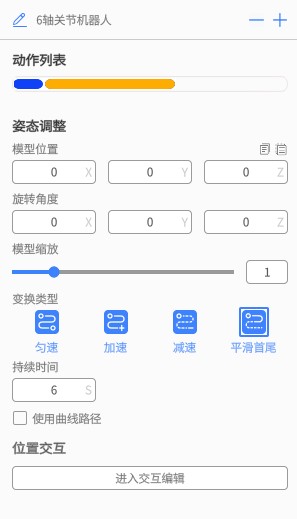
- 前面我们对第二子级添加了动作调整,继续选中6轴关节机器人模型整体,添加姿态调整,这时动作列表出现第三个线段,即第三个动作;
选中模型子级“part_03”,沿z轴旋转40°左右,然后选中子级“part_04”,沿z轴旋转合适角度;
点击右上角的【预览】按钮,播放刚刚设置的模型动作,观察动作的持续时间是否合适。
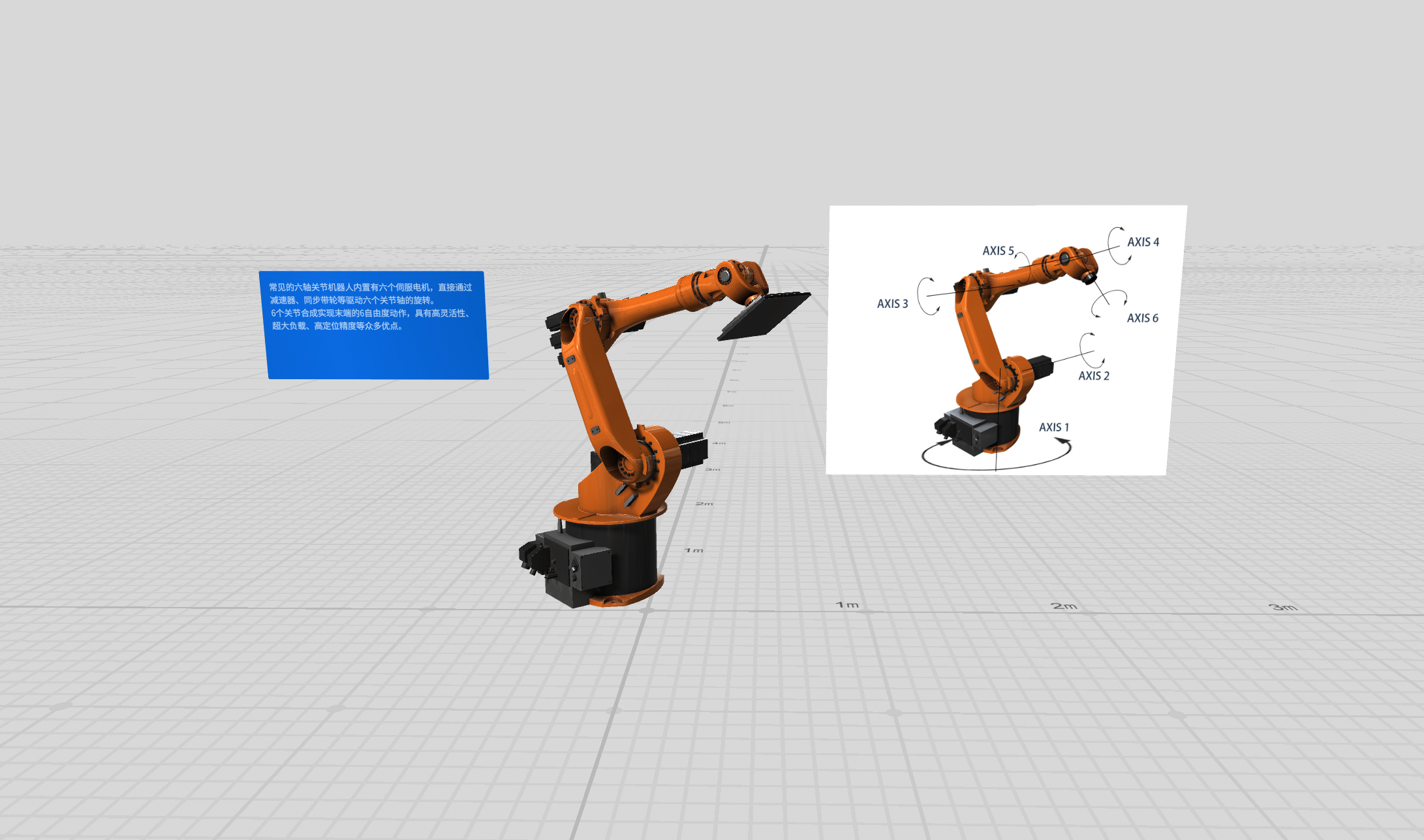
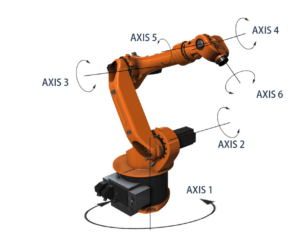
- 在场景01添加文本框,内容:“常见的六轴关节机器人内置有六个伺服电机,直接通过减速器、同步带轮等驱动六个关节轴的旋转。6个关节合成实现末端的6自由度动作,具有高灵活性、超大负载、高定位精度等众多优点。“放在合适位置。